
Braço robótico em compósito
Neste estudo de caso, a Loson e a Ensinger cooperaram para melhorar o desempenho de um braço robótico utilizado em um robô Delta para linhas de embalagem de alimentos. Máquinas rápidas e precisas como esta são usadas em fábricas para pegar e embalar produtos, graças à sua velocidade, que permite, em alguns casos, realizar até 300 movimentos de picking por minuto.
Peças de compósito de fibra de carbono (neste caso, tecido de carbono em matriz epóxi) são projetadas e produzidas para reduzir peso e inércia, preservando as altas propriedades mecânicas típicas de ligas metálicas de alta qualidade. Embora a leveza seja um dos principais objetivos, insertos metálicos pesados (aço, alumínio ou, em poucos casos, titânio) normalmente são necessários para conectar as peças de compósito de fibra de carbono a outros componentes mecânicos, de modo que o benefício da fibra de carbono é parcialmente reduzido.
A Fig. 1 mostra um braço robótico para uma máquina na indústria de embalagem de alimentos: de um peso total de cerca de 300 g, mais de 80 g (27%) correspondem a insertos de alumínio, de modo que o esforço para reduzir o peso da peça (para reduzir a inércia) é parcialmente comprometido. Além disso, em ambientes severos, onde ácidos/bases agressivos são usados para limpeza (por exemplo, linhas de embalagem de alimentos), esta configuração está sujeita a alto risco de corrosão por sais ou corrosão por acoplamento galvânico.
Alumínio
A ideia é substituir um inserto feito de alumínio (ou outro metal, e, portanto, ainda mais pesado) por um polímero de alta performance, a fim de reduzir o peso, diminuir o risco de corrosão e, ao mesmo tempo, garantir a alta performance mecânica exigida pela aplicação.
Insertos metálicos geralmente são colados às peças de compósito utilizando colas epóxi de dois componentes, ou são incorporados diretamente na estrutura do compósito usando a resina da matriz polimérica como agente de ligação.
Infelizmente, ao analisar a literatura, a resistência de ligação entre um inserto polimérico e a peça de compósito não consegue garantir o mesmo nível de adesão, como pode ser observado, por exemplo, na Tabela n.1. Este gráfico mostra que a resistência ao cisalhamento de uma conexão por colagem de diferentes polímeros termoplásticos está geralmente bem abaixo do limite de 6 MPa, considerado geralmente como o mínimo para ligação "estrutural".
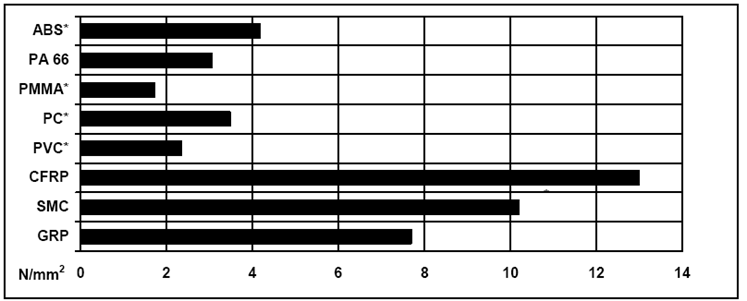
Tabela 1 Resistência ao cisalhamento de diferentes polímeros colados
Para uma aplicação puramente mecânica como esta, são necessários materiais com resistência mecânica máxima, e a necessidade de um material deslizante (devido ao atrito na parte exposta do inserto) direciona a escolha para polímeros termoplásticos semicristalinos de alta performance.
Materiais reforçados com vidro seriam a primeira escolha em termos de propriedades mecânicas e rigidez, mas em casos de deslizamento e atrito frequentes, eles podem desgastar a peça oposta e, em alguns casos, podem ser frágeis demais para suportar inversões de rotação frequentes e rápidas (comparáveis a choques), típicas desses componentes.
Um material otimizado para deslizamento, contendo lubrificantes internos como grafite ou PTFE, prejudicaria a adesão com o CFRP e a matriz epóxi.
O TECAPEEK natural foi escolhido para alcançar o equilíbrio ideal entre propriedades mecânicas, comportamento de deslizamento e possibilidades de ligação.

Como sempre, ao substituir um metal por um plástico, o projeto do componente precisa ser analisado e adaptado ao novo material após a identificação de possíveis aspectos críticos, como tolerâncias, design estrutural e conexões.
A adesão de epóxis ao PEEK é sempre muito menor do que ao metal. Por exemplo, a Tabela n.2 mostra a colagem de PEEK sobre PEEK com diferentes tratamentos de superfície e sob diversas condições, e evidencia o baixo desempenho das superfícies poliméricas coladas.
No caso deste braço robótico em compósito, o projeto original do inserto não garantia a adesão segura do componente à matriz CFRP, com risco de rotação relativa entre o inserto e o braço.
Para superar o baixo desempenho da cola e evitar a rotação relativa dos componentes, foi projetada e produzida uma conexão mecânica entre o inserto TECAPEEK natural e a peça de compósito de fibra de carbono. Conforme mostrado na seção transversal do desenho n.2, alguns rebaixos são usinados no inserto TECAPEEK natural para que ele possa ser incorporado com segurança na peça de compósito de fibra de carbono durante o processo de laminação. Os rebaixos dos insertos são completamente preenchidos com o material compósito laminado, evitando qualquer rotação relativa entre os dois componentes.
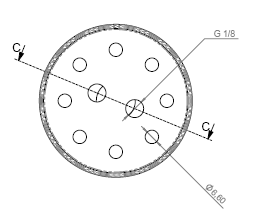
Desenho n.1 - Projeto original do inserto de alumínio: com a forma externa arredondada, a adesão entre o metal e a fibra de carbono depende exclusivamente da resistência da colagem.
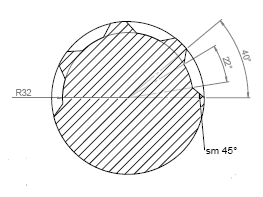
Desenho n.2 - Inserto com rebaixos usinados externamente para conexão mecânica adicional à matriz de fibra, evitando rotações indesejadas.
As imagens mostram a comparação entre o componente original e o novo braço robótico, onde o inserto de alumínio foi substituído por um inserto TECAPEEK natural.
 Inserto de alumínio
Inserto de alumínio
 Inserto TECAPEEK natural
Inserto TECAPEEK natural
Foi desenvolvida uma solução perfeitamente intercambiável para o braço robótico em compósito original. O componente foi aprimorado por meio de:
-
Uso de insertos usinados em plástico de alta performance (TECAPEEK natural), o que aumenta a relação desempenho/peso do conjunto em comparação com insertos de alumínio.
-
Atualização do projeto do componente, incluindo rebaixos usinados, preenchidos diretamente com a matriz do compósito durante o processo de laminação, eliminando o uso de cola. Esta solução evita rotações relativas indesejadas entre os componentes.
-
Proteção contra corrosão galvânica e química devido à ausência de metais.
Com esta solução, o peso total da peça foi reduzido em quase 15%, permitindo teoricamente uma operação mais rápida e segura do robô Delta, graças ao menor momento de inércia.
A empresa Loson s.r.l. é especializada no desenvolvimento de projetos e produtos utilizando compósitos de matriz polimérica baseados em tecnologia CFRP (Polímero Reforçado com Fibra de Carbono). A partir dos segmentos Aeronáutico e Aeroespacial, seu know-how também foi transferido para a tecnologia de Automação Industrial para aplicações de alta performance.